Entry
Reader's guide
Entries A-Z
Subject index
Transformations, Cartesian Coordinate
When the coordinates of certain points have been determined in a coordinate system, there is often the need to know the coordinates of the points in another coordinate system. The calculation of the coordinates of the points in the second system based on the coordinates in the first system and the relationship between the two coordinate systems is referred to as coordinate transformation. This entry describes coordinate transformations between Cartesian coordinate systems.
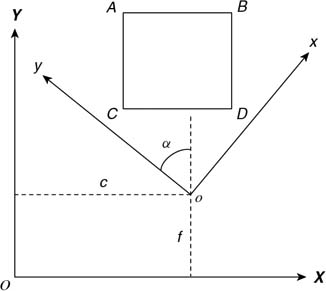
For example, in Figure 1, if the 2D coordinates of points A, B, C, and D in the x-y system are known, they can be transformed into the X-Y system if the relationship between the two systems is known.
In general, coordinate transformations between Cartesian systems can be expressed as
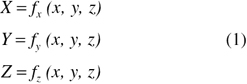
or
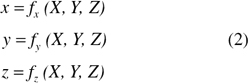
where (x, y, z) and (X, Y, Z) are the 3D coordinates of a point in the x-y-z and X-Y-Z systems respectively, and fx, fy, fz, fX, fY and fZ are functions (transformation models) relating the two coordinate systems. Equation 1 transforms the coordinates of any point from the x-y-z system to the X-Y-Z system, and Equation 2 transforms the coordinates from the X-Y-Z system to the x-y-z system.
Coordinate transformations between Cartesian systems can often be interpreted as certain geometrical changes, typically, the translations or the shifts of theOorigin, rotation, warping, and scale change, through which one of the coordinate systems is made to overlap exactly with the second system. For example, for the two coordinate systems shown in Figure 1, the translations of the origin of one of the systems are c and f, respectively, in the X and Y directions, and the rotation angle for the x-y axes to become parallel with the X-Y axes is α.
Figure 1 Points in Two Different Coordinate Systems
Coordinate Transformation Models
Different coordinate transformation models are suited to different kinds of problems. Each model has its own special properties. Some of the most commonly used models for transforming coordinates between Cartesian or near-Cartesian coordinate systems are summarized below.
2D Conformal Transformation
Conformal transformation is one of the most commonly used coordinate transformation models. The model is also known as similarity, or Helmert transformation. The general 2D conformal transformation model is as follows:

where (see Figure 1)
c, f translations of the origin of the x-y system (the old system) along the X-and Y-axes, respectively, or the coordinates of the origin of the x-y system in the X-Y system (the new system);
α rotation angle of the x-y axes to the X-Y axes. α is defined positive when the rotation is clockwise and is zero if the axes are parallel; and
s scale factor between the two systems. When the unit length of the new system is shorter than that of the old system, s is larger than 1, and vice versa.
Equation 3 transforms the coordinates of any point from the x-y system to the X-Y system. Coefficients c, f,α, and, s are the transformation parameters. The parameters define the relationship between the two coordinate systems.
Equation 3 is often written in the following form
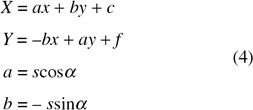
where a, b, c, and f above represent another form of the four transformation parameters in the coordinate transformation model. Since in either Equation 3 or 4, four parameters define the relationship between the two reference systems completely, the model is a fourparameter transformation model.
...
- Analytical Methods
- Analytical Cartography
- Cartographic Modeling
- Cost Surface
- Cost-Benefit Analysis
- Data Mining, Spatial
- Density
- Diffusion
- Ecological Fallacy
- Effects, First- and Second-Order
- Error Propagation
- Exploratory Spatial Data Analysis (ESDA)
- Fragmentation
- Geocoding
- Geodemographics
- Geographical Analysis Machine (GAM)
- Geographically Weighted Regression (GWR)
- Georeferencing, Automated
- Geostatistics
- Geovisualization
- Image Processing
- Interpolation
- Intervisibility
- Kernel
- Location-Allocation Modeling
- Minimum Bounding Rectangle
- Modifiable Areal Unit Problem (MAUP)
- Multicriteria Evaluation
- Multidimensional Scaling (MDS)
- Multivalued Logic
- Network Analysis
- Optimization
- Outliers
- Pattern Analysis
- Polygon Operations
- Qualitative Analysis
- Regionalized Variables
- Slope Measures
- Spatial Analysis
- Spatial Autocorrelation
- Spatial Econometrics
- Spatial Filtering
- Spatial Interaction
- Spatial Statistics
- Spatial Weights
- Spatialization
- Spline
- Structured Query Language (SQL)
- Terrain Analysis
- Cartography and Visualization
- Analytical Cartography
- Cartograms
- Cartography
- Choropleth Map
- Classification, Data
- Datum
- Generalization, Cartographic
- Geovisualization
- Isoline
- Legend
- Multiscale Representations
- Multivariate Mapping
- National Map Accuracy Standards (NMAS)
- Normalization
- Projection
- Scale
- Shaded Relief
- Symbolization
- Three-Dimensional Visualization
- Tissot's Indicatrix
- Topographic Map
- Virtual Environments
- Visual Variables
- Conceptual Foundations
- Accuracy
- Aggregation
- Cognitive Science
- Direction
- Discrete versus Continuous Phenomena
- Distance
- Elevation
- Extent
- First Law of Geography
- Fractals
- Geographic Information Science (GISci)
- Geographic Information Systems (GIS)
- Geometric Primitives
- Isotropy
- Layer
- Logical Expressions
- Mathematical Model
- Mental Map
- Metaphor, Spatial and Map
- Nonstationarity
- Ontology
- Precision
- Representation
- Sampling
- Scale
- Scales of Measurement
- Semantic Interoperability
- Semantic Network
- Spatial Autocorrelation
- Spatial Cognition
- Spatial Heterogeneity
- Spatial Reasoning
- Spatial Relations, Qualitatitve
- Topology
- Uncertainty and Error
- Data Manipulation
- Data Modeling
- z-Values
- Computer-Aided Drafting (CAD)
- Data Modeling
- Data Structures
- Database Management System (DBMS)
- Database, Spatial
- Digital Elevation Model (DEM)
- Discrete versus Continuous Phenomena
- Elevation
- Extensible Markup Language (XML)
- Geometric Primitives
- Index, Spatial
- Integrity Constraints
- Layer
- Linear Referencing
- Network Data Structures
- Object Orientation (OO)
- Open Standards
- Raster
- Scalable Vector Graphics (SVG)
- Spatiotemporal Data Models
- Structured Query Language (SQL)
- Tessellation
- Three-Dimensional GIS
- Topology
- Triangulated Irregular Networks (TIN)
- Virtual Reality Modeling Language (VRML)
- Design Aspects
- Geocomputation
- Geospatial Data
- Accuracy
- Address Standard, U.S.
- Attributes
- BLOB
- Cadastre
- Census
- Census, U.S.
- Computer-Aided Drafting (CAD)
- Coordinate Systems
- Data Integration
- Datum
- Digital Chart of the World (DCW)
- Digital Elevation Model (DEM)
- Framework Data
- Gazetteers
- Geodesy
- Geodetic Control Framework
- Geography Markup Language (GML)
- Geoparsing
- Georeference
- Global Positioning System (GPS)
- Interoperability
- LiDAR
- Linear Referencing
- Metadata, Geospatial
- Metes and Bounds
- Minimum Mapping Unit (MMU)
- National Map Accuracy Standards (NMAS)
- Natural Area Coding System (NACS)
- Photogrammetry
- Postcodes
- Precision
- Projection
- Remote Sensing
- Scale
- Semantic Network
- Spatial Data Server
- Standards
- State Plane Coordinate System
- TIGER
- Topographic Map
- Universal Transverse Mercator (UTM)
- Organizational and Institutional Aspects
- Address Standard, U.S.
- Association of Geographic Information Laboratories for Europe (AGILE)
- Canada Geographic Information System (CGIS)
- Census, U.S.
- Chorley Report
- Coordination of Information on the Environment (CORINE)
- COSIT Conference Series
- Data Access Policies
- Data Warehouse
- Digital Chart of the World (DCW)
- Digital Earth
- Digital Library
- Distributed GIS
- Enterprise GIS
- Environmental Systems Research Institute, Inc. (ESRI)
- ERDAS
- Experimental Cartography Unit (ECU)
- Federal Geographic Data Committee (FGDC)
- Framework Data
- Geomatics
- Geospatial Intelligence
- GIS/LIS Consortium and Conference Series
- Google Earth
- GRASS
- Harvard Laboratory for Computer Graphics and Spatial Analysis
- IDRISI
- Intergraph
- Interoperability
- Land Information Systems
- Life Cycle
- Location-Based Services (LBS)
- Manifold GIS
- MapInfo
- Metadata, Geospatial
- MicroStation
- National Center for Geographic Information and Analysis (NCGIA)
- National Geodetic Survey (NGS)
- National Mapping Agencies
- Open Geospatial Consortium (OGC)
- Open Source Geospatial Foundation (OSGF)
- Open Standards
- Ordnance Survey (OS)
- Quantitative Revolution
- Software, GIS
- Spatial Data Infrastructure
- Spatial Decision Support Systems
- Standards
- U.S. Geological Survey (USGS)
- University Consortium for Geographic Information Science (UCGIS)
- Web GIS
- Web Service
- Societal Issues
- Access to Geographic Information
- Copyright and Intellectual Property Rights
- Critical GIS
- Cybergeography
- Data Access Policies
- Digital Library
- Economics of Geographic Information
- Ethics in the Profession
- Geographic Information Law
- Historical Studies, GIS for
- Liability Associated With Geographic Information
- Licenses, Data and Software
- Location-Based Services (LBS)
- Privacy
- Public Participation GIS (PPGIS)
- Qualitative Analysis
- Quantitative Revolution
- Spatial Literacy
- Loading...
Get a 30 day FREE TRIAL
-
 Watch videos from a variety of sources bringing classroom topics to life
Watch videos from a variety of sources bringing classroom topics to life -
Read modern, diverse business cases
-
Explore hundreds of books and reference titles

Read next

More like this
Sage Recommends
We found other relevant content for you on other Sage platforms.
Have you created a personal profile? Login or create a profile so that you can save clips, playlists and searches